
由于现代人的饮食习惯改变,使得结肠癌和结肠息肉等疾病得到广泛的关注。肠镜检查成为了结肠和其他肠道疾病诊断的标准诊断方式。最近一项发布在消化道疾病周(Digestive Disease Week)2017的研究,向我们展示了一种新型的结肠镜检查方式——磁控胶囊机器人。
传统的结肠检查方式是肠镜检查。肠镜检查是一种侵入式的检查方式,通过一个末端装有电子摄像机的电子内镜,长度约140cm,可弯曲,由患者肛门进入体内,依次进入直肠、结肠到达盲肠。虽然,肠镜检查可以有效的观察到肠粘膜的异常,如癌变、糜烂、出血和息肉等,但是作为一种侵入性的检查方式,有一定的不适和并发症,且检查前期有严格的饮食和排空要求,因而,很多患者会对这种检查产生畏惧的心理。由于患者的这种畏惧心理,致使一些大肠病变甚至肿瘤难以早期确诊,以至于延误了最佳的治疗时机。很多术后患者和疑似肠穿孔和腹膜炎等都难以使用这种侵入式的方式检查,限制了传统肠镜检查在术后追踪中的应用。
肠镜检查对于结直肠癌和肠息肉等早期诊断具有非常重要的意义,并且,许多中年人群或者有个人和家族病史的人群都应该每年进行定期的肠镜检查,那么,如何让这种检查变得更加易于接受,对于健康的监测和术后追踪也非常重要。
来自范德比尔特大学(Vanderbilt University)和利兹大学(University of Leeds)开发了一款18mm大小的磁控胶囊结肠镜。胶囊机器人可以通过吞咽等较为温和的方式进入肠道,也会不产生如传统肠镜那样的侵入式副作用。在外部,研究人员通过外部磁体实现对体内的磁控机器人进行操控。磁控的胶囊机器人已经在猪的体内进行了成功试验,通过外部操控,机器人可以在肠道内完成前进和翻转,并且可以向后弯曲,从而使摄像机可以对整个肠道壁进行反向观察。
研究的通讯作者 Keith Obstein博士表示,“胶囊机器人不但能够自主穿行在肠道中执行诊断功能,还可以执行机动治疗,例如组织活检和息肉切除,这是传统有线肠镜难以做到的事情。由于胶囊机器人是通过外部磁力进行控制,而不是传统结肠镜那样医生在后面推动,将大大减少肠镜对肠道内壁的物理压力,也会减少镇静和止痛药物的需求。”
胶囊机器人可以在12秒内进行翻转,这在研究人员的预期之内。由于在猪体试验的成功,Obstein博士表示,团队将预计在2018年开展人体试验。在此期间,团队将继续对胶囊机器人的性能进行优化控制。
希望不远的将来,Obstein博士和他的团队通过胶囊机器人可以简化结肠疾病的诊断和管理,减少过程中对镇静或止痛药的需要,以更小的副作用和伤害性,更高效舒适的完成肠道的健康监测。
参考资料
[1] Colonoscopy performed by magnetically controlled capsule robot
[2] First-ever autonomously controlled'capsule robot' explores colon
来源:康健新视野(微信号 HealthHorizon) 作者:遇见未来

为你推荐

 资讯
资讯 带状疱疹疫苗“遇冷”,百克生物2024年净利润腰斩
近日,国内疫苗龙头企业百克生物发布2024年年报,数据显示,其报告期内实现营收12 29亿元,同比下降32 64%;归属于上市公司股东的净利润2 32亿元,同比下降53 67%。对于营收...
2025-04-23 12:59




 资讯
资讯 重庆常用药联盟接续集采中选结果
近日,重庆常用药联盟接续集采中选情况公布,该联盟由重庆牵头,联合湖北、广西、海南、贵州、云南、青海、宁夏、新疆及新疆生产建设兵团等十省(区、市)开展的药品集中带量采...
2025-04-21 18:48

 资讯
资讯 全周期智控慢病,诺和诺德与京东健康开启战略合作
2025年4月21日,全球领先的生物制药公司诺和诺德与京东健康在北京正式签署战略合作协议,标志着双方在糖尿病和体重管理领域的合作进入新阶段。依托诺和诺德百年深耕慢病领域的专...
2025-04-21 15:57
 资讯
资讯 康方生物1类新药依若奇单抗上市申请获批,用于中重度斑块状银屑病成人患者
该药是我国第一个且唯一获批上市的IL-12 IL-23“双靶向”单克隆抗体新药,是康方生物自身免疫性疾病领域首个获批上市的一类新药。
2025-04-21 13:39
 资讯
资讯 阿斯利康乳腺癌1类创新药卡匹色替片中国获批
该药适用于联合氟维司群用于转移性阶段至少接受过一种内分泌治疗后疾病进展,或在辅助治疗期间或完成辅助治疗后12个月内复发的激素受体(HR)阳性、人表皮生长因子受体2(HER2)...
2025-04-21 11:02
 资讯
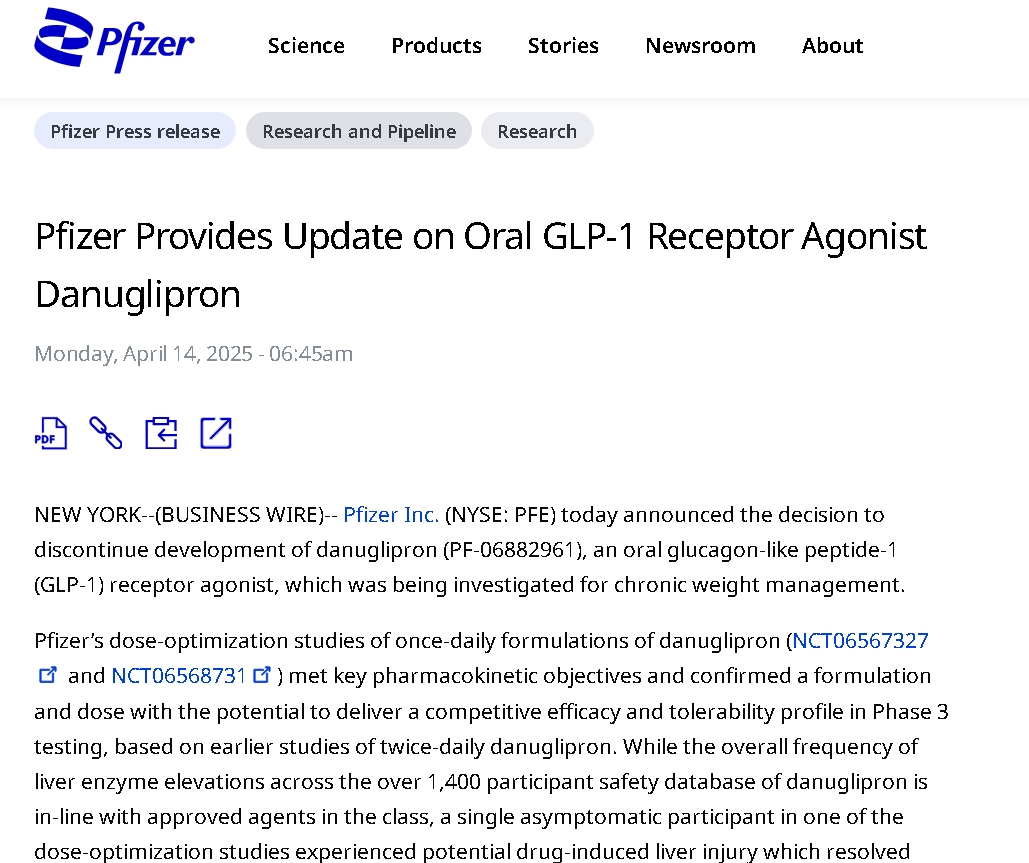
资讯 辉瑞宣布终止一款口服GLP-1减肥药的临床开发
近日,辉瑞在其官网宣布,决定终止开发口服胰高血糖素样肽-1受体(GLP-1R)激动剂Danuglipron(PF-06882961),原因系在一项有关用药剂量的临床试验中,一名患者出现了可能由该...
2025-04-21 10:29
 资讯
资讯 福建省医保局印发单列门诊统筹支付医保药品目录(2024年版)
根据2024年6月发布的《福建省医保药品单列门诊统筹支付管理办法(试行)》,为了让参保患者无需住院、在门诊就医也能用上国家谈判药品、享受医保待遇,将适用于门诊治疗、使用周...
2025-04-20 13:34
 资讯
资讯 首批中国消费名品名单,医药健康企业有哪些?
近日,工业和信息化部办公厅发布首批中国消费名品名单,分为中国消费名品名单和中国消费名品成长企业名单。首批中国消费名品名单共包括93个企业品牌和43个区域品牌。中国消费名...
2025-04-20 11:17
 资讯
资讯 携手共绘“个性化近视手术”新蓝图:爱尔眼科与爱尔康启动100家医院全光塑技术战略合作
双方将以技术共享为核心,以人才培养为支撑,以科研协作为纽带,全力推进屈光手术标准化诊疗体系建设,加速前沿技术在临床领域的普及应用
文/ 屈慧莹 2025-04-19 23:35
 资讯
资讯 CDE:简化港澳已上市传统口服中成药内地上市注册审批申报资料及技术要求
允许香港、澳门特区本地登记的生产企业持有,并经香港、澳门特区药品监督管理部门批准上市且在香港、澳门特区使用15年以上,生产过程符合药品生产质量管理规范(GMP)要求的传统...
2025-04-18 18:54
 资讯
资讯 君德医药完成近亿元A轮融资,加速推进创新药械组合平台建设与产品上市
本轮融资主要用于首个减重口服器械的注册及生产销售,以及加速多个核心创新药械组合技术平台的产品管线研发进程。
2025-04-18 14:34
 资讯
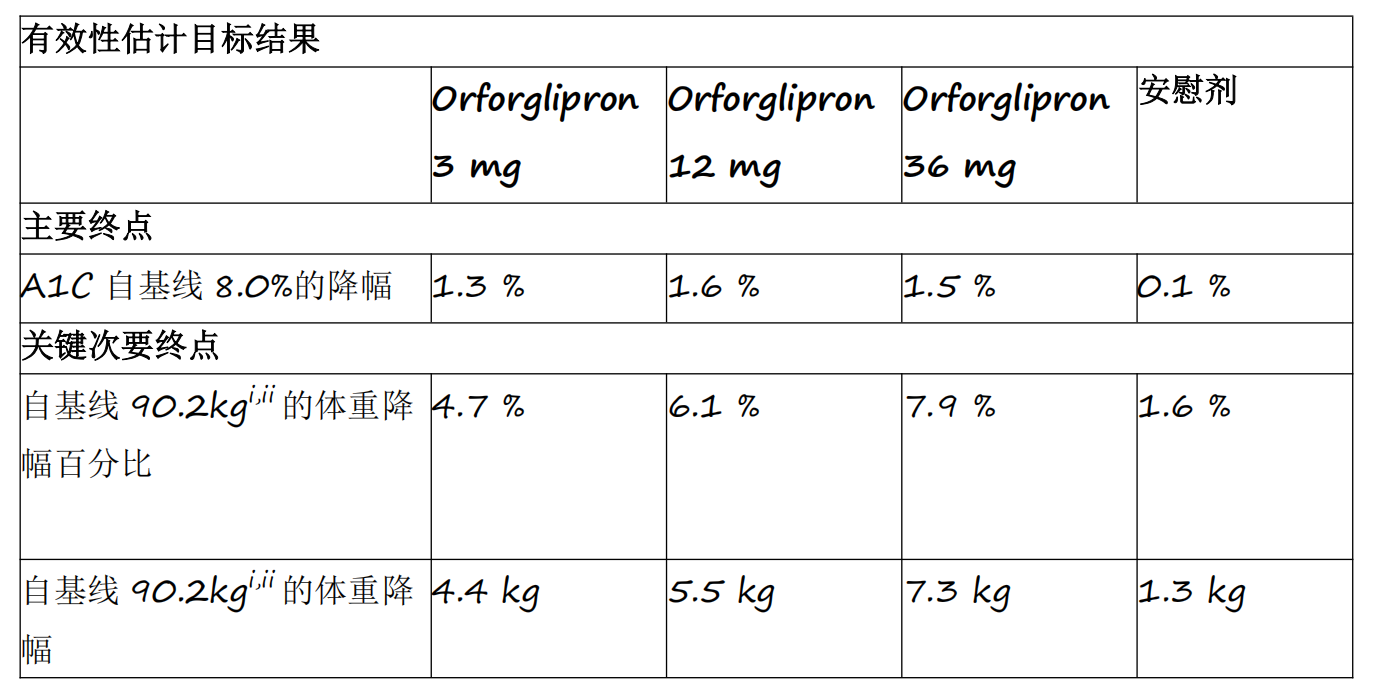
资讯 礼来首个小分子口服GLP-1RA药物orforglipron 3期临床研究成功
Orforglipron是首个成功完成3期临床研究的小分子GLP-1类药物,各剂量组平均A1C降幅为1 3%至1 6%
2025-04-18 14:12